

کنترلکننده PID که به نام Proportional–Integral–Derivative شناخته میشود، نوعی سیستم کنترلی مبتنی بر فیدبک است که هدف اصلی آن این است که نتیجه نهایی فرآیند را به مقدار مورد نظر ما نزدیک کند. به عبارت دیگر، هدف اصلی این کنترلکننده، هدایت سیستم به سمت یک مقدار، موقعیت یا سطح خاصی است که ما تعیین میکنیم. کنترلکنندههای PID در حوزه صنعت به عنوان یکی از دقیقترین و پایدارترین انواع کنترلکنندهها شناخته میشوند و معمولاً برای خودکارسازی فرآیندها یا به عنوان بخشی از سیستمهای اتوماسیون به کار میروند تا به خروجیهای از پیش تعیین شده یا اهداف مشخص نزدیکتر شوند. به دلیل کارایی بالا و سهولت در استفاده، این روش مورد تأیید بسیاری از شرکتهای بزرگ جهانی در حوزه تولید کنترلر قرار گرفته و در محصولاتشان به کار میرود.
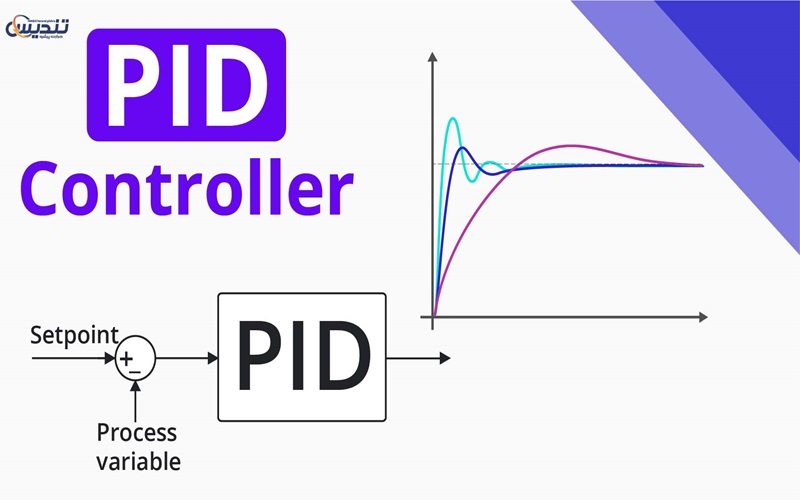
در کنترلکننده PID، دو مفهوم “خطا” و “SetPoint” از اهمیت ویژهای برخوردارند. در اینجا، ستپوینت به معنای هدف مورد نظر (سطح، موقعیت، مقدار یا هر چیزی که قصد داریم به آن دست یابیم) است و خطا به میزان تفاوت (انحراف) بین این هدف و خروجی نهایی اشاره دارد. واضح است که هرچه مقدار خطا کمتر باشد، وضعیت بهتری داریم و این نشاندهنده آن است که توانستهایم خروجی سیستم را به دقت با مقدار مورد نظر خود هماهنگ کنیم.
تعریف کنترلر PID
کنترلر PID یکی از ابزارهای مهم در مهندسی کنترل است که برای تنظیم و کنترل سیستمها به کار میرود. این کنترلر از سه بخش اصلی تشکیل شده: تناسبی (P)، انتگرالی (I) و مشتقگیری (D). هر یک از این بخشها وظیفه خاصی دارند و با هم کار میکنند تا عملکرد سیستم را بهبود ببخشند.
بخش تناسبی مسئول است که با توجه به خطای موجود، خروجی را تنظیم کند. یعنی هر چه خطا بیشتر باشد، خروجی هم بیشتر میشود. بخش انتگرالی به مرور زمان به خطاهای گذشته اهمیت میدهد و سعی میکند تا خطاهای تجمعی را جبران کند. این بخش کمک میکند تا در طول زمان، سیستم به عملکرد بهتری دست یابد. در نهایت، بخش مشتقگیری به تغییرات ناگهانی در خطا واکنش نشان میدهد و سعی میکند تا از نوسانات ناخواسته جلوگیری کند.
به طور کلی، کنترلر PID به ما این امکان را میدهد که سیستمها را به دقت بیشتری کنترل کنیم و پاسخ بهتری به تغییرات در شرایط ورودی داشته باشیم. با استفاده از این کنترلر، میتوانیم به سطح بالاتری از کارایی و ثبات در سیستمهای مختلف دست پیدا کنیم. در واقع، این کنترلر میتواند در حوزههای مختلفی مانند صنعت، اتوماسیون و حتی رباتیک به کار گرفته شود و نقش مهمی در بهینهسازی فرآیندها ایفا کند.
تئوری عملکرد کنترلر PID
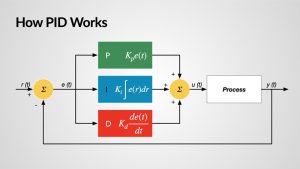
کنترلر PID به طور کلی وظیفهاش این است که یک پارامتر را روی یک مقدار مشخص یا «سِتپوینت» ثابت نگه دارد. این کار از طریق تأثیر سه بخش ریاضی بر روی خطای سیستم در هر لحظه انجام میشود. خطا در واقع از اختلاف بین مقدار واقعی که اندازهگیری میشود و مقدار سِتپوینت به دست میآید. بنابراین، با استفاده از این سه ترم، کنترلر میتواند به تنظیم دقیق سیستم کمک کند تا به هدف خود برسد و نوسانات را به حداقل برساند. این فرآیند به کنترل بهتر و کارآمدتر سیستمهای مختلف منجر میشود و باعث میشود که عملکرد سیستم بهینهتر گردد. سه ترم PID عبارتند از:
- ترم تناسبی: این ترم به خطای فعلی سیستم در هر لحظه بستگی دارد و به صورت مستقیم با میزان خطا در ارتباط است.
- ترم انتگرالگیر: این بخش از کنترلر، خطاهای قبلی و انباشتهشده سیستم را در نظر میگیرد و بر اساس آن عمل میکند.
- ترم مشتقگیر: ترم مشتقگیر، پیشبینیکننده رفتار آینده سیگنال خطا است و بر اساس تغییرات لحظهای، واکنش نشان میدهد.
کنترلکننده PID، یک الگوریتم پیشرفته است که با ترکیب سه پارامتر اصلی، یعنی تناسب، انتگرال و مشتق، خروجی کنترل را تنظیم میکند. این سیگنال کنترلی به تجهیزات مختلف مانند موتورها، المنتها یا سوپاپها اعمال میشود. سپس، یک سنسور، متغیر خروجی سیستم را اندازهگیری کرده و به صورت لحظهای با مقدار ستپوینت مورد نظر مقایسه میکند. این فرایند، امکان کنترل دقیق و پایدار متغیر خروجی را در نقطهی مطلوب فراهم میکند.
کنترل کننده دمای PID چیست؟
کنترلکننده دمای PID ابزاری است که به ما کمک میکند تا دما را بهطور خودکار و بدون نیاز به دخالت مداوم اپراتور کنترل کنیم. این دستگاه با استفاده از سنسورهایی مانند ترموکوپل یا RD، دمای واقعی را اندازهگیری کرده و آن را با دمای مورد نظر مقایسه میکند. سپس بر اساس این مقایسه، یک خروجی تولید میکند که میتواند برای تنظیم عملگرهای مختلف مانند موتورهای DC یا سایر عناصر کنترلی استفاده شود. به عبارت دیگر، کنترلکننده PID به ما این امکان را میدهد که بهصورت دقیق و کارآمد، دما را در سیستمهای مختلفی مانند دیگهای بخار، کورهها و حتی یخچالها تنظیم کنیم. این سیستم به ما کمک میکند تا از تغییرات ناخواسته دما جلوگیری کرده و شرایط مطلوب را حفظ کنیم.
کنترل کننده PID چگونه کار می کند؟
کنترل کنندههای PID ابزاری فوقالعاده برای مدیریت متغیرهای مختلف مانند دما، فشار و جریان در فرآیندهای صنعتی به شمار میروند. همانطور که از نامش پیداست، این کنترل کنندهها ترکیبی از سه روش کنترل هستند: تناسبی، انتگرالی و مشتقی. این ویژگیها به سیستم کمک میکند تا به طور هوشمند و خودکار به تغییرات ناگهانی واکنش نشان دهد و درنتیجه عملکرد بهتری داشته باشد. به عبارت دیگر، کنترل کننده PID با استفاده از اطلاعات لحظهای، تلاش میکند تا نوسانات و تغییرات را به حداقل برساند و ثبات بیشتری در فرآیند ایجاد کند. این سیستمها به دلیل دقت و کارایی بالایشان در صنایع مختلف، از محبوبیت زیادی برخوردارند و به مهندسان این امکان را میدهند تا فرآیندها را با کنترل بهتری مدیریت کنند.
مبانی کنترل کننده PID
کنترلکننده PID یکی از ابزارهای مهم در سیستمهای کنترلی است که هدفش این است که بازخورد سیستم را به یک نقطه تنظیم مشخص برساند. به عنوان مثال، مثل ترموستاتی که دما را کنترل میکند و بر اساس دمای تنظیمشده، دستگاههای گرمایشی یا سرمایشی را روشن یا خاموش میکند. این نوع کنترلکنندهها در سیستمهایی که تغییرات انرژی را به سرعت پاسخ میدهند و جرم کمتری دارند، عملکرد بهتری دارند.

استفاده از کنترلکنندههای PID در سیستمهایی که بار آنها به طور مداوم تغییر میکند، بسیار مناسب است. این کنترلکنندهها میتوانند به طور خودکار با تغییرات مکرر نقطه تنظیم، مقدار انرژی یا جرم قابل کنترل را تنظیم کنند تا همیشه به عملکرد بهینه برسند. بنابراین، این ویژگیها باعث میشود که کنترلکنندههای PID یک گزینه عالی برای مدیریت سیستمهای مختلف باشند.
اصل کار کنترل کننده PID
اصل کار کنترل کننده PID این است که سه بخش اصلی آن یعنی بخش تناسبی، انتگرالی و مشتقی به صورت جداگانه تنظیم شوند. این تنظیمات به ما کمک میکنند تا به بهترین عملکرد دست پیدا کنیم. به عبارت دیگر، با توجه به اختلاف بین مقادیر واقعی و مقادیر هدف، یک ضریب تصحیح محاسبه شده و به ورودی سیستم اعمال میشود. برای مثال، اگر ما در حال کنترل دما یک کوره باشیم و ببینیم که دما پایینتر از حد مطلوب است، سیستم به طور خودکار گرما را افزایش میدهد تا به دمای مورد نظر برسد. این روند به ما این امکان را میدهد که به صورت دقیق و کارآمد بتوانیم سیستم را مدیریت کنیم و به اهداف خود برسیم.
- تنظیم تناسبی به معنای تغییر هدف بر اساس اختلاف موجود است. در واقع، هر زمان که اختلاف بین وضعیت فعلی و هدف ما کاهش مییابد، اصلاحات بیشتری انجام میشود. این بدین معناست که هدف نهایی هرگز بهطور کامل دستیافتنی نخواهد بود، زیرا با نزدیکتر شدن به هدف، همواره نیاز به تنظیمات جدید وجود دارد. به عبارت دیگر، هر چقدر هم که تلاش کنیم تا به هدف نزدیک شویم، همیشه فاصلهای باقی میماند که ما را به ادامه تلاش برای بهبود و اصلاح بیشتر تشویق میکند. این پروسه به ما یادآوری میکند که مسیر رسیدن به هدف، یک سفر مداوم است و باید همیشه آمادهی یادگیری و تنظیم مجدد باشیم.
- تنظیم انتگرالی به دنبال این است که با جمعآوری مؤثر نتایج خطا از عمل “P”، ضریب تصحیح را بهبود ببخشد و در نتیجه مشکلات موجود را حل کند. برای مثال، اگر دمای کوره پایینتر از حد مطلوب باشد، “I” وارد عمل میشود تا دما را به سطح مورد نظر برساند. اما در این فرآیند، “I” سعی میکند خطای تجمعی را به صفر برساند که این موضوع ممکن است باعث ایجاد نوسانات ناخواسته در سیستم شود. به عبارت دیگر، هنگامی که “I” تلاش میکند تا دما را سریعاً بالا ببرد، ممکن است بیش از حد واکنش نشان دهد و باعث شود که دما به طور ناگهانی افزایش یابد. این مسئله نهتنها میتواند به ناپایداری سیستم منجر شود، بلکه میتواند عملکرد کلی آن را تحت تأثیر قرار دهد. بنابراین، مهم است که در تنظیمات این سیستمها دقت بیشتری به خرج دهیم تا از این گونه مشکلات جلوگیری شود.
- تنظیم مشتق سعی دارد با کم کردن سرعت ضریب تصحیح در زمان نزدیک شدن به هدف، این نوسان را به حداقل برساند.
سخن پایانی
کنترلر PID که به نام کنترل کننده پی آی دی هم شناخته میشود، یکی از محبوبترین روشهای کنترلی است که در بسیاری از صنایع و فرآیندها به کار میرود. این کنترلر به ما کمک میکند تا پارامترهای مختلفی مثل سرعت موتورهای DC، فشار، دما و بسیاری از موارد دیگر را به طور دقیق کنترل کنیم. با استفاده از این الگوریتم، میتوانیم عملکرد سیستمها را بهینه کنیم و آنها را در شرایط مطلوب نگه داریم. به عبارت دیگر، کنترلر PID مانند یک راهنمای دقیق عمل میکند که به ما امکان میدهد تا روی فرآیندهای مختلف نظارت کنیم و از نوسانات ناخواسته جلوگیری کنیم. این کنترلر به عنوان ابزاری کارآمد در بسیاری از زمینهها از جمله اتوماسیون صنعتی و سیستمهای تهویه مطبوع به کار میرود و اهمیت زیادی در بهبود کارایی و دقت فرآیندها دارد.